Model ruchu drogowego Växjö został kompleksowo zaktualizowany po raz pierwszy od czasu jego powstania w 2012 r. Aktualizacja obejmuje dwie różne prognozy, jedną na 2040 r., zakładającą wzrost liczby ludności, nowe obszary rozwoju i planowaną infrastrukturę drogową; i jedną na 2050 r., zakładającą dodanie kilku większych inwestycji autostradowych. Ciekawym spostrzeżeniem jest to, że pomimo zwiększonego obszaru dostępnego dla samochodów, w obu scenariuszach nadal problemem pozostanie zatłoczenie na drogach w wyniku zwiększonego popytu na podróże, który spowoduje równoległy wzrost liczby ludności powiększonego miasta oraz brak środków na rzecz zrównoważonego transportu.
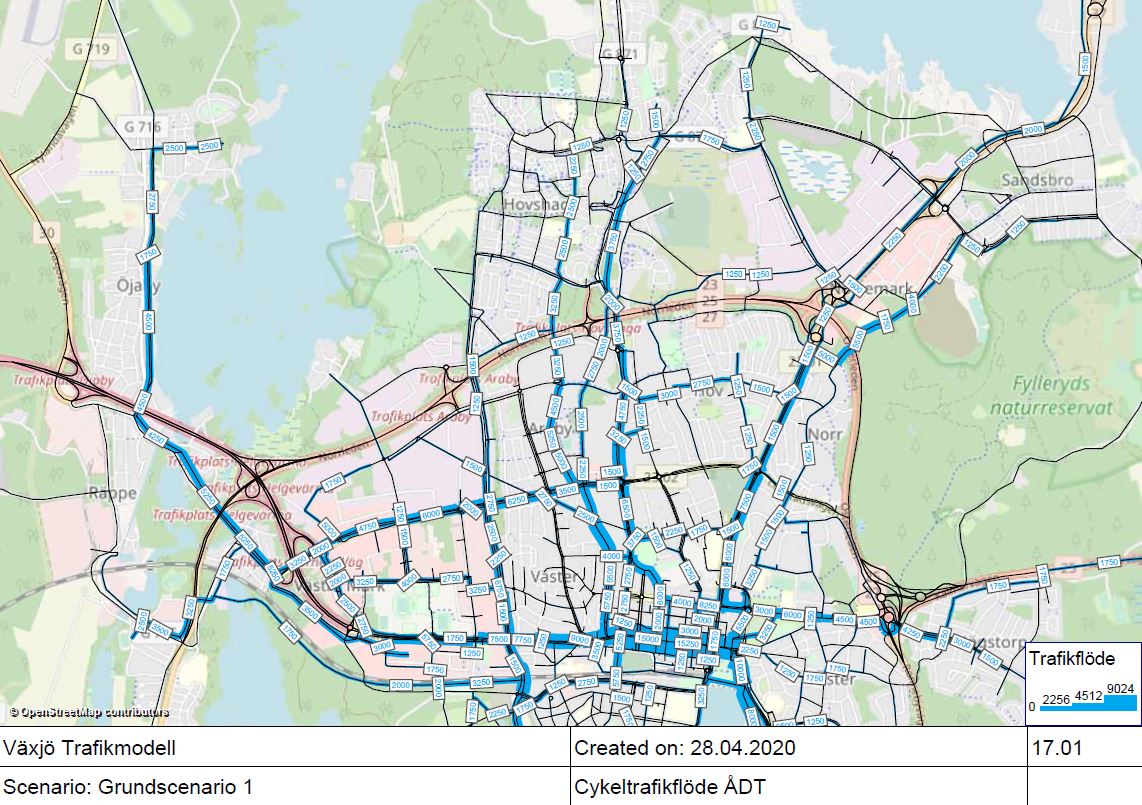
Aby lepiej zrozumieć potencjał zrównoważonego transportu, czterostopniowy model VISUM obejmuje teraz także zagadnienia dotyczące transportu publicznego i jazdy na rowerze, w tym zewnętrzny moduł rowerowy, który lepiej symuluje ruch rowerowy w mieście. Za pomocą tego modułu gmina Växjö może lepiej zidentyfikować kluczowe trasy rowerowe, a także luki w sieci rowerowej; może przetestować nowe ścieżki rowerowe, a także skutki ograniczania ruchu samochodowego, które uczynią aktywny transport bardziej atrakcyjnym. Logika modułu uwzględnia czynniki, które mają tendencję do wpływania na jazdę rowerem, takie jak czas, odległość, postrzegane niebezpieczeństwo, wzgórza, skrzyżowania itp.
Zespół SUMBA złożył wniosek o przedłużenie projektu, aby zrealizować dodatkowe prace w Växjö mające na celu przetestowanie różnych scenariuszy ruchu drogowego, takich jak to, które wdrożono w Gandawie w 2017 roku. Plan wprowadziłby zmiany w sieci dróg, sprzyjając ruchowi pieszemu, rowerowemu i transportowi publicznemu na krótkich dystansach (około 5 km i poniżej), ograniczając podróż samochodem między dzielnicami. Samochody zostają skierowane na obwodnice, w przypadku Växjö wykorzystując planowane autostrady. Za pomocą tego modelu planiści drogowi i urbaniści Växjö mogą lepiej zrozumieć korzyści i ryzyko związane z takim planem, zanim łopata dotknie ziemi.